Flapping Wing Micro Aerial Vehicle (FWMAV) Control System
Description
Flapping Wing Micro Aerial Vehicles (FWMAVs) are small flying robots inspired by birds and insects, and they use advanced control systems to stay stable and move in complex environments. They matter because they consume very low power which makes the system increases aerial operations by 2-3 times better compared to current drones power consumption, also they can perform tasks like surveillance, search and rescue, and environmental monitoring, especially in tight or GPS-denied areas where normal drones struggle. As robotics and control systems continue to improve, FWMAVs and similar technologies will become smarter, more efficient, and more autonomous, playing a big role in the future of robotics.
System Overview
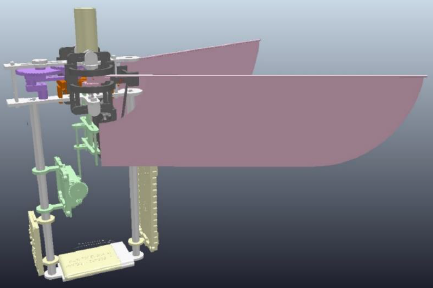
It is a complex system because it has nonlinear and coupled dynamics, meaning its motion is highly dependent on multiple factors at the same time. To control it effectively, I use a combination of control strategies like PID, State Feedback Linearization (SFL), and Model Predictive Control (MPC). The system also includes sensors and estimation techniques to accurately measure the vehicle’s position and motion, even in the presence of noise and vibrations.
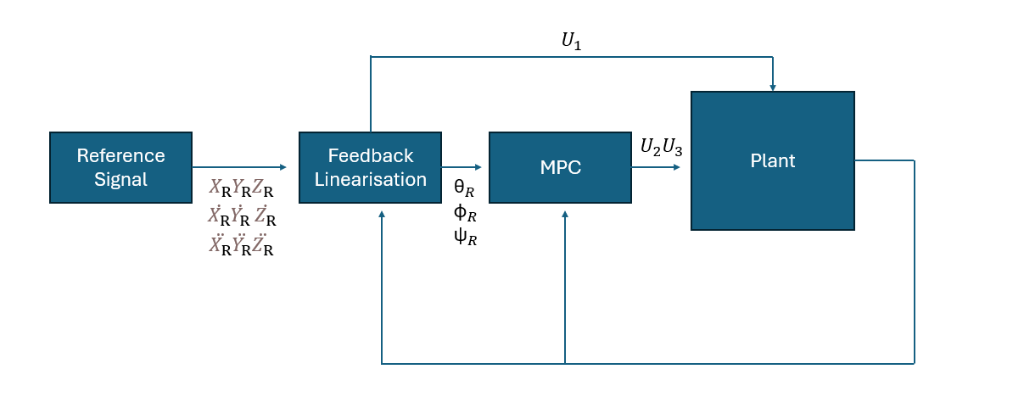
The control system works by first using simulation feedback technique and a mathematical model of the FWMAV to predict how it will move, and then calculating the best control inputs to keep it stable and follow a desired path. Feedback linearization is a control method that makes a difficult, nonlinear system behave like a simple linear system, so it becomes easier to control. Model Predictive Control (MPC) is a method that looks ahead into the future and calculates the best control actions to keep the system stable and performing well as shown above in diagram. Together, they help the FWMAV fly smoothly and handle complex and changing conditions.
Components Used
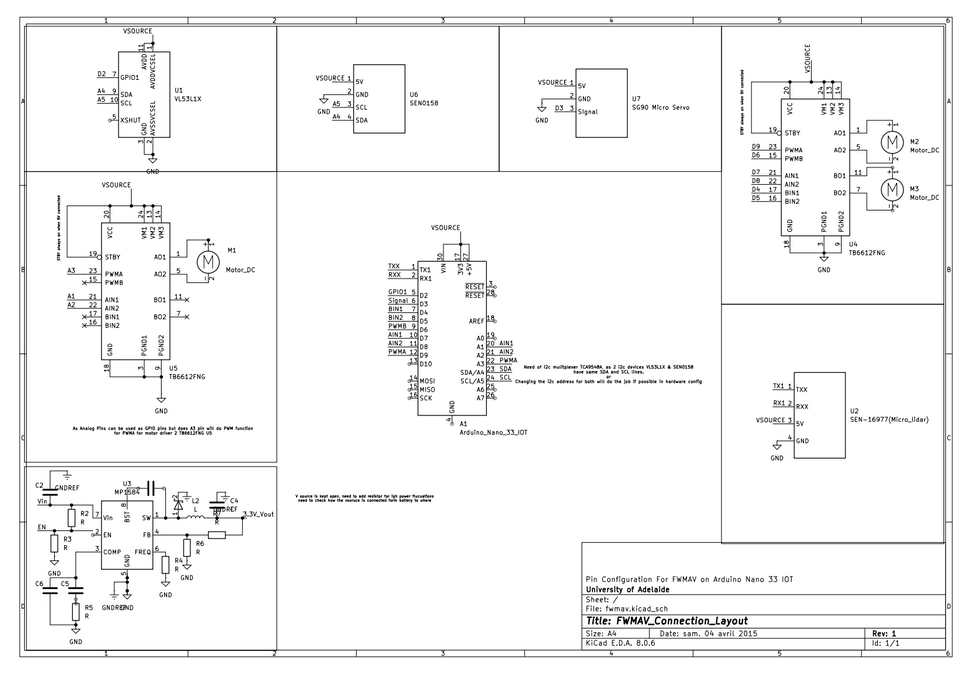
Hardware Components
• Arduino Nano / ESP32 (32-bit microcontroller for control and processing)
• ICM-20948 (9-axis IMU for motion sensing)
• Spektrum AR620 (6-channel DSMX receiver)
• ESP8266 (Wi-Fi communication module)
• Pololu U3V12F5 (5V voltage regulator)
• LD1117 (3.3V LDO regulator)
• 3.7V 200mAh LiPo Battery (Power source)
These components were selected for reliability, efficiency, and compatibility to ensure stable system operation.
Software Components
• CoppeliaSim (Simulation of physical system)
• Simulink (Control system modeling)
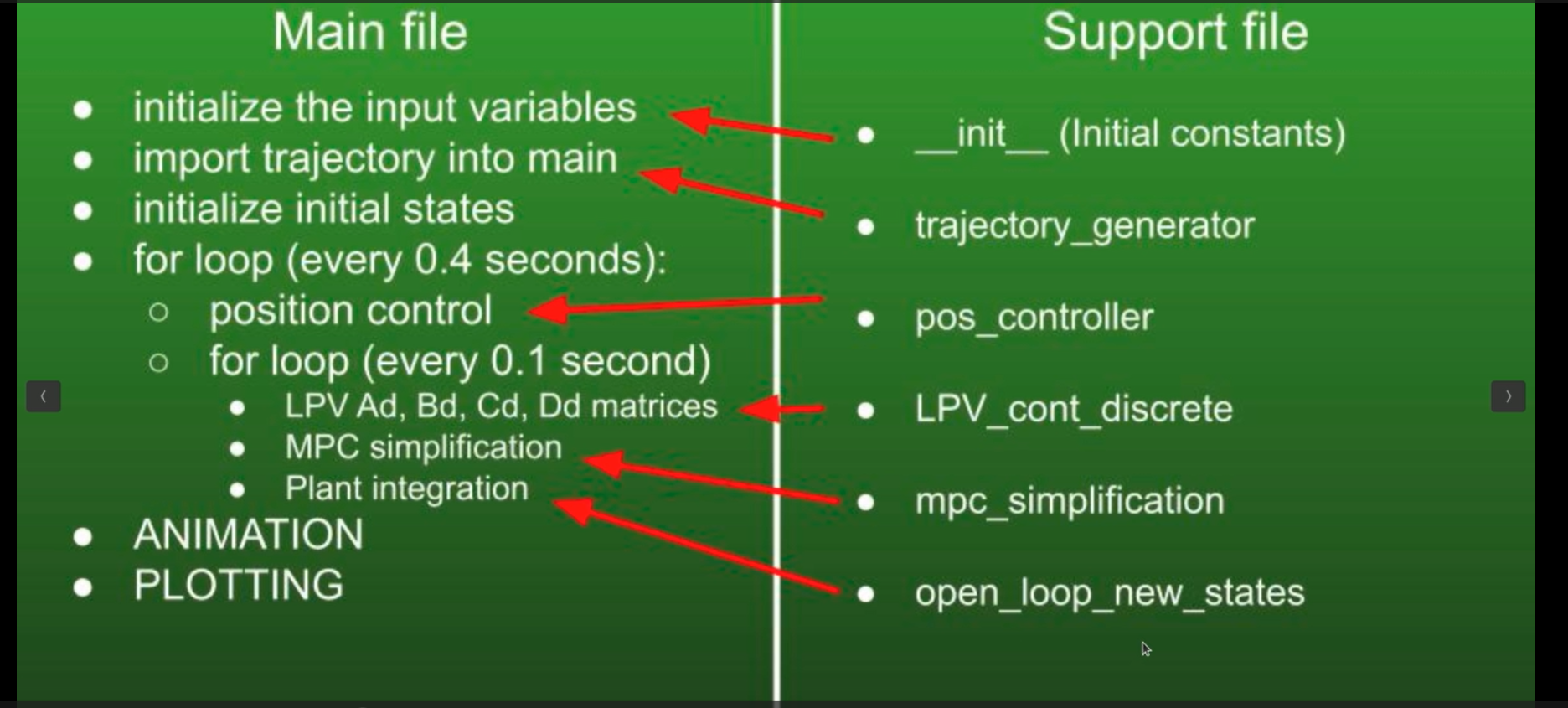
• MATLAB (Control algorithm implementation)
• Python (GUI and real-time monitoring)
Design & Planning
In this project, we used a mix of nonlinear dynamics and advanced control theory to design and stabilize the FWMAV. First, the system was modeled using the Newton–Euler equations, giving us a full nonlinear state-space representation that captures position, velocity, and rotational motion. To make control easier, we applied feedback linearization in the outer loop, which simplifies the nonlinear position dynamics into a linear form and helps generate desired attitude and thrust commands.
For the inner loop, we used Linear Parameter Varying (LPV) theory combined with Model Predictive Control (MPC), allowing the controller to adapt to changing flight conditions while predicting future system behavior and handling constraints like actuator limits.
A dual-loop (cascaded) control structure was key—separating position control (outer loop) from fast attitude control (inner loop), which improved stability and performance. Finally, motor commands were generated using a motor mixing matrix, translating control inputs into individual motor speeds. Overall, the “aha” moment was realizing that combining linearization, prediction, and layered control makes it possible to reliably control a complex, highly nonlinear flying system in a simple and structured way.
Results
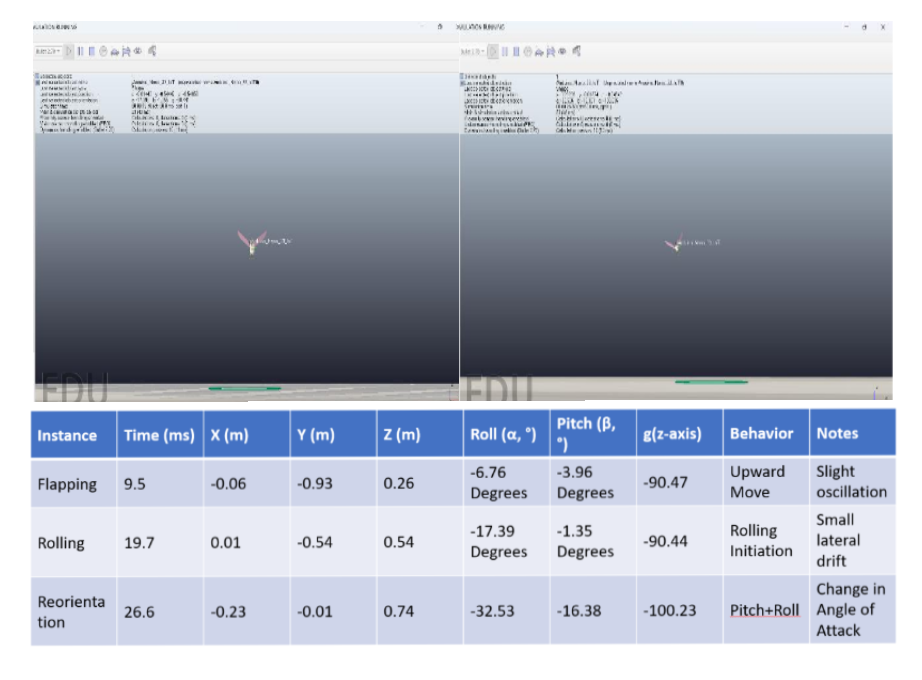
The simulation results show that the LPV-MPC controller performs effectively in controlling the nonlinear FWMAV system. The vehicle successfully tracks the predefined 3D trajectory according to Coppeliasim Simulation and also analysed the three axis control precision accoring to the table above, with the actual path closely following the reference and only small deviations due to system delays and input limits. Position, velocity, and acceleration across all axes (x, y, z) remain stable and well-controlled, while the attitude angles (roll, pitch, yaw) are accurately maintained by the inner-loop MPC even during dynamic changes.
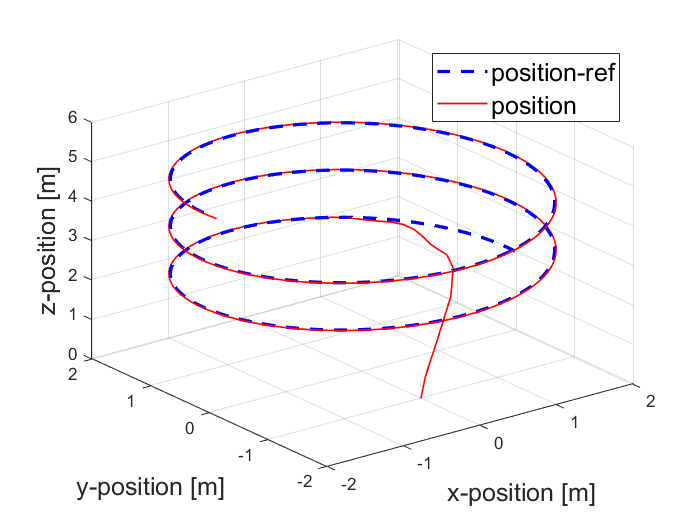
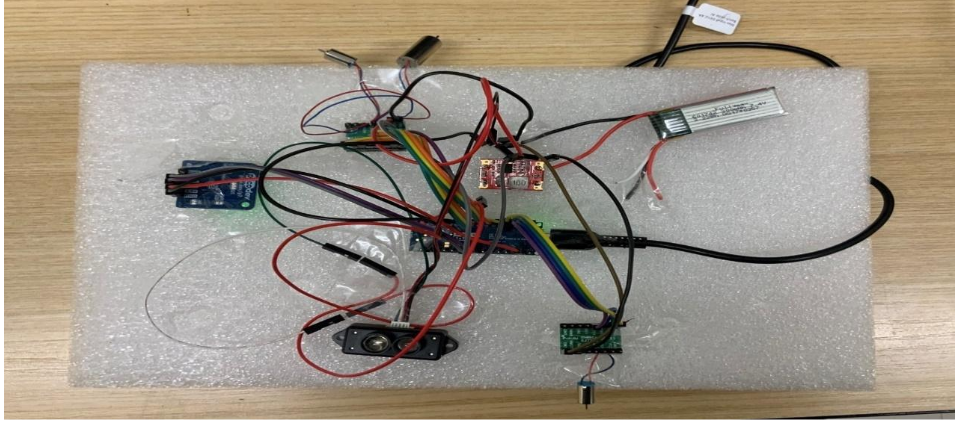
The control inputs (motor thrusts) stay within their constraints, demonstrating efficient optimization and safe operation. In addition to the simulation, I have successfully achieved stable 3-axis motion in CoppeliaSim and developed the hardware setup, where all sensors and components were integrated and tested using an Arduino-based system powered by a Li-Po battery, confirming proper functionality of the overall control system.
Conclusion
This project demonstrates how combining nonlinear control methods, simulation, and hardware integration enables stable control of a complex aerial system like FWMAV. The use of feedback linearization, MPC, and a dual-loop structure ensures reliable performance in dynamic environments.